Attitude Estimation Using Complementary Feedback Filter
Using cheap sensors in fusion to solve the problem of attitude estimation — combining a gyroscope, accelerometer, and magnetometer into an Attitude Heading Reference System (AHRS).
B.S. Robotics Engineering · Sensor Fusion · Dept. of Electrical and Computer Engineering
Abstract
Estimation of rotation about the Earth is a common problem in aviation and other fields. The advent of the smartphone pushed the field of estimating orientation into the commercial realm, requiring cheaper solutions to a usually expensive problem. This paper deeply investigates using cheap sensors in fusion to solve the problem of attitude estimation.
1. Introduction
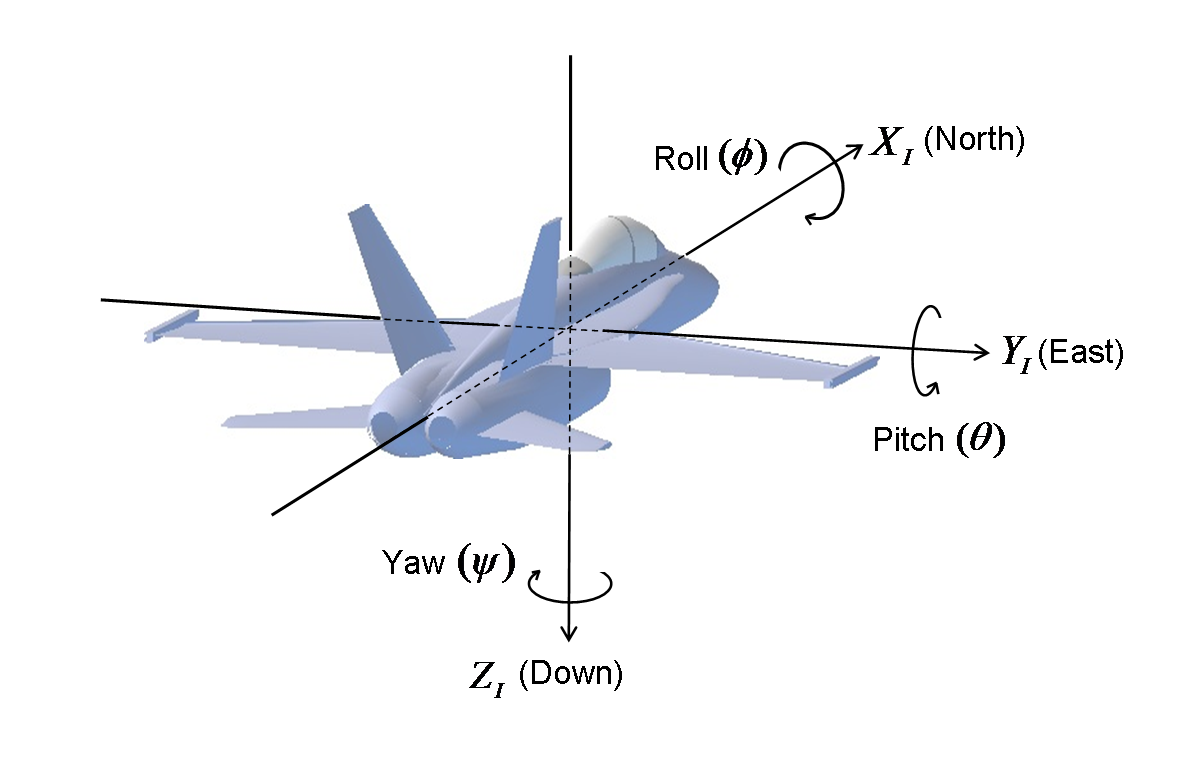
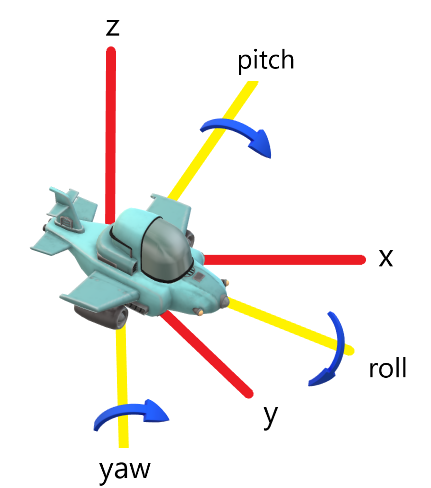
An AHRS (Attitude Heading Reference System) is the combination of several sensors to measure the rotation of an object relative to a global coordinate frame. Consider an aircraft — it becomes necessary to describe its heading: is it pointing straight down? Is it level with the surface of the Earth? The “attitude” of an object describes its rotation in respect to some reference frame.
1.1 Referencing Earth
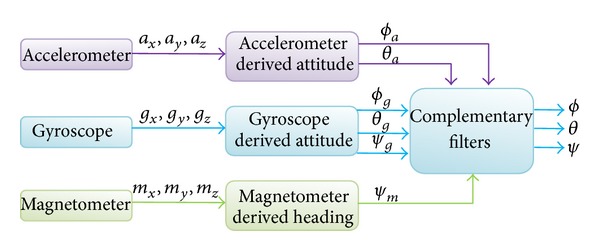
A magnetometer, accelerometer, and gyroscope sensor are used to create this system. The gyroscope is the primary sensor while the other two provide feedback. The accelerometer measures Earth's gravity and always has the information for “down,” and the magnetometer always points at North because of Earth's magnetic field.
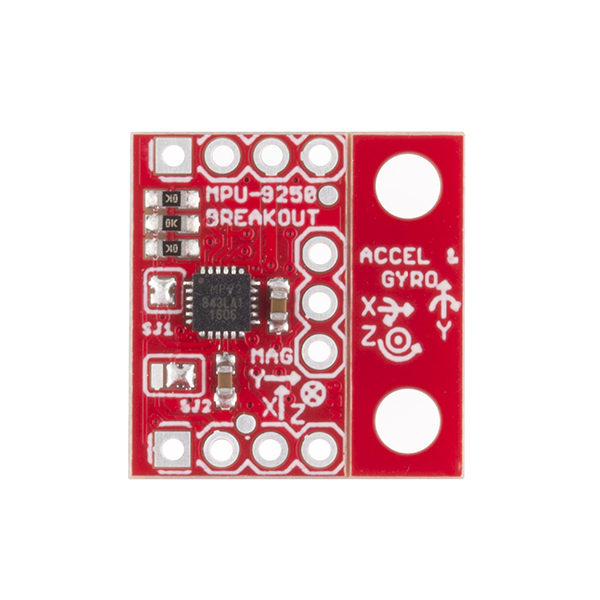
1.2 MPU9250 Sensor
The MPU9250 breakout board by SparkFun was used, combining a gyroscope, magnetometer, and accelerometer in a single package with simple communication protocols.
2. Storing the Rotation Angles
The rotation information is stored in a rotation matrix. Using linear algebra, this transformation matrix contains the relationship between the airplane's coordinate frame and the global coordinate frame:
R = Ryaw · Rpitch · Rroll
R : V⃗plane → V⃗global
This is referred to as the Direct Cosine Matrix (DCM) — standard nomenclature in attitude estimation.
2.1 The DCM
The DCM is a 3×3 transformation matrix based on pitch (φ), roll (θ), and yaw (ψ) provided by the sensors. It contains all important information about the body frame and inertial frame, and is the transformation between the two. The inertial frame is based on cardinal directions (North, East, South, West), while the body frame is the perspective of the sensors.
The DCM connects spatial coordinates to angular ones. Matrix transformations are order dependent (ABC ≠ CBA). This implementation applies transformations in pitch, roll, yaw order — rotation around the x, y, then z axis.
3. Getting the Rotation Angles
Each sensor contributes different information to the attitude estimation:
- Measures acceleration in x, y, z
- Always measures gravity
- Gives pitch and roll information
- No yaw information
- Tracks rate of change of rotation
- Integrate to get angle
- Primary sensor in fusion
- Tracks from starting position
- Measures magnetic field
- Always points to magnetic north
- Gives yaw information
- Affected by nearby magnets
4. Integration of Body-Fixed Rates
Two techniques convert gyro velocity data (deg/s) into rotation position data (deg): (1) forward integration and (2) matrix exponential form. Forward integration in matrix form is:
R+ = R− + [ω⃗×]R−Δt
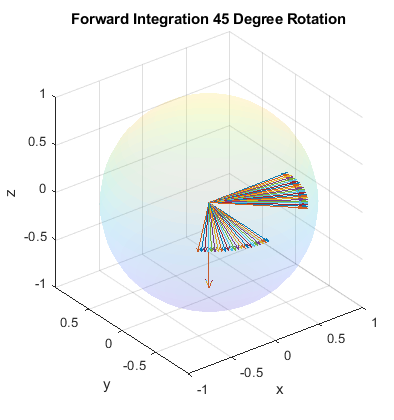
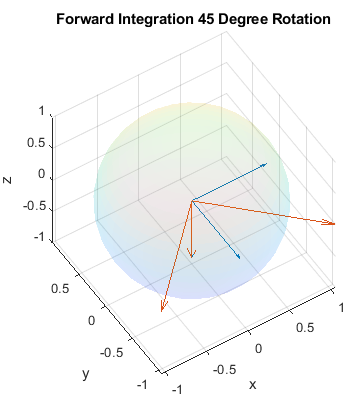
4.1 Forward Integration
Basic integration of gyro rotation rates using the skew symmetric ω matrix. With a simulated rotation rate of 1 deg/sec and polling rate of 1 Hz, the rotation appears stable for 45 degrees of rotation. However, the DCM doesn't maintain orthonormality over time — after nine revolutions, the x and y vectors are no longer unit vectors.
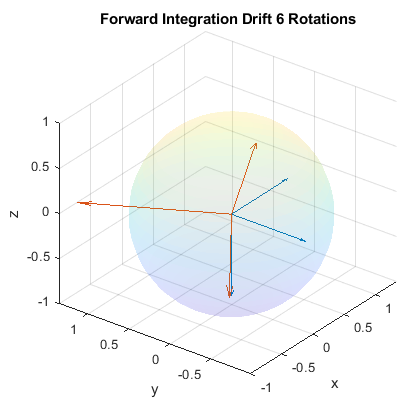
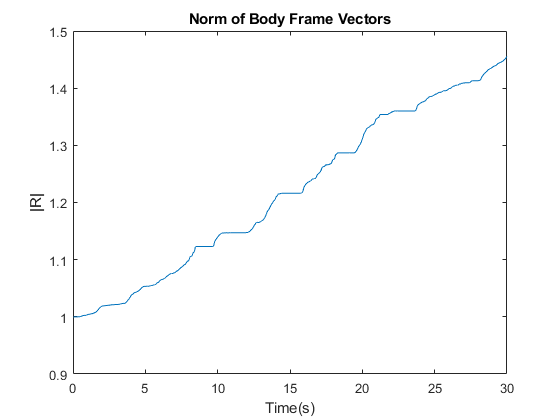
4.1.2 Experimental Forward Integration
Using real gyro data with previously determined biases and scale factor, the DCM drifts out of orthonormality after just 6 rotations in 30 seconds. This demonstrates that simple forward integration creates huge drifting errors in a short period of time.
4.2 Rodrigues Rotation Matrix
The matrix exponential form maintains orthonormality of the DCM but still has errors relative to the gyro sensor in real space. The Rodrigues Exponential is:
Rexp(ωΔt) = I + sinc(ωΔtnorm) · cos(ωΔtnorm) · ωΔt + sinc(ωΔtnorm)²/2 · (ωΔt)²
5. Closed Loop Integration
The gyro sensor has no reference for the inertial frame — it only measures rotation from its starting position. The magnetometer and accelerometer provide absolute references: the accelerometer gives “down” (via gravity), and the magnetometer gives “north” (via Earth's magnetic field).
The closed loop uses two corrections: an error correction (corrects absolute angle of rotation for pitch and roll) and a bias estimate (accounts for systematic gyro bias that would otherwise overpower the error correction as values converge).
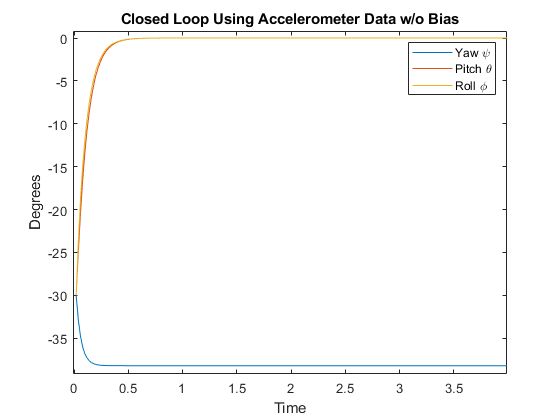
5.1 Z-Axis Error Correction
The error correction is calculated as wmeasa = a⃗b × R'a⃗i, measuring the difference between the DCM and the accelerometer (which should always point down). Before integration, the error is added: ω+ = Kpa · wmeasa.
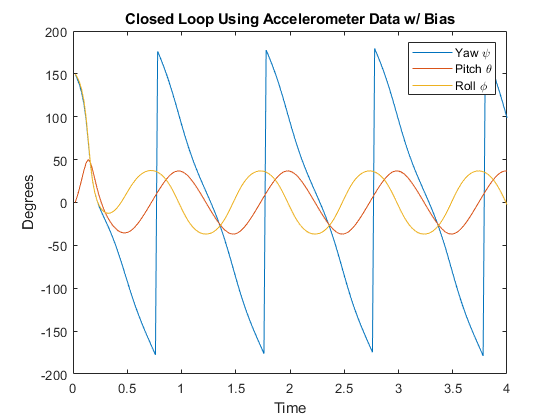
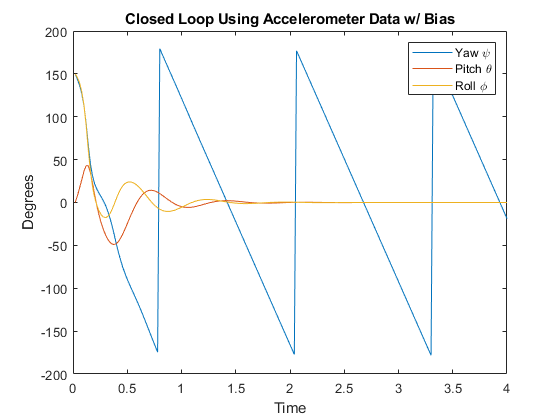
Without bias estimate, the pitch and roll converge toward the correct absolute rotations but cannot account for the bias error — as values get closer to correct, the error correction weakens and is overpowered by the bias. With the bias estimate Bestimate+ = −Kia · wmeasa, pitch and roll level out and hold absolute positions even with bias.
6. Accelerometer Feedback Tuning
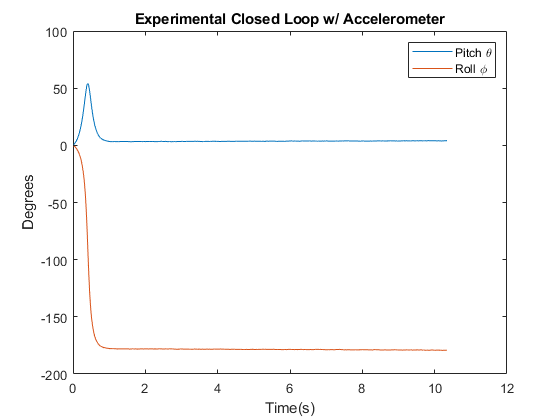
The techniques were implemented on a microcontroller and compared to a MATLAB simulation. The proportional gain Kp was varied to determine the best noise-to-correction ratio. Higher Kp values reduce the time to acquire the initial position from ~15 seconds down to ~1 second.
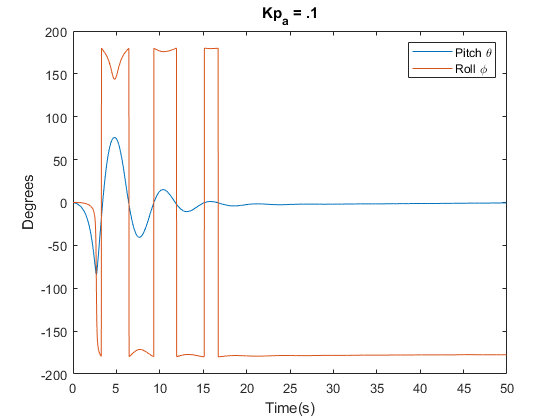
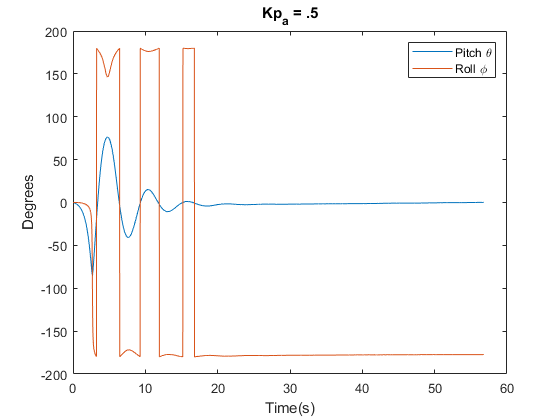
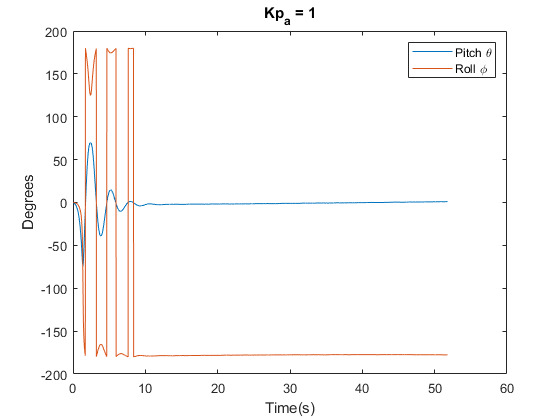
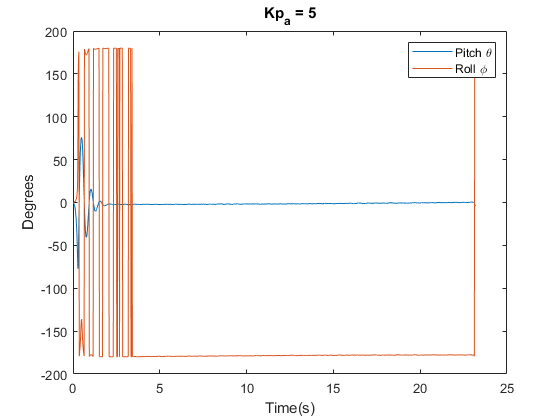
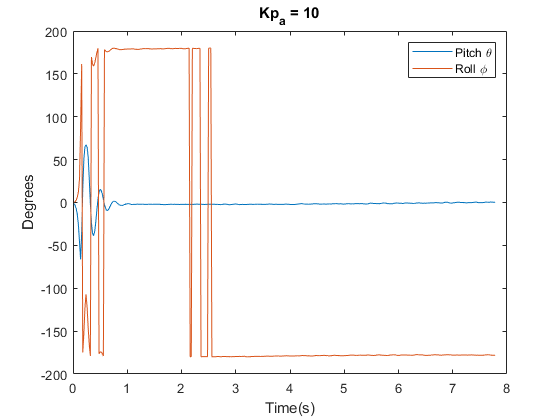
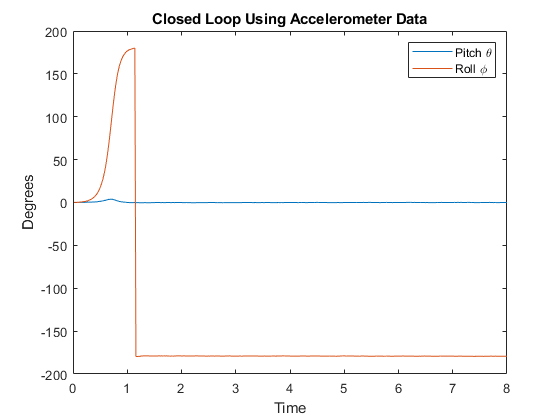
With Kp = 10 and Ki = 0.5, the sensor was placed upside down to test convergence to a 180° rotation. The experimental responses were comparable to the MATLAB simulation, though the axes approached 180° from the opposite side.
7. Conclusion
With calibration techniques and familiarization with DCM rotation matrices, attitude sensors are now well understood. There are several approaches to accomplish this, including using the TRIAD algorithm vs. the closed loop feedback system explored here. Attitude sensors can be accomplished in many ways — this is just one version of an implementation using complementary feedback filtering.